{kind=link}
Die Sensoren autonomer Fahrzeuge müssen extrem zuverlässig sein, weil Verkehrsteilnehmer künftig nicht mehr permanent auf den Verkehr achten. Bislang werden die Sensoren in aufwendigen Testfahrten geprüft. Dank des neuen Atrium-Testgeräts vom Fraunhofer-Institut für Hochfrequenzphysik und Radartechnik (FHR) aber könnten sich diese Fahrten künftig zu einem großen Teil ins Labor verlagern. Denn Atrium gaukelt dem Radarsensor eine künstliche Szenerie vor, die den realen Bedingungen im Straßenverkehr sehr nahekommt.
Das Auto der Zukunft fährt allein. Man wird sich wie von einem privaten Chauffeur durch die Lande fahren lassen, während man sich unterhält, die Zeitung liest oder vielleicht ein Video schaut. Doch obwohl längst Fahrassistenten wie die automatische Abstandskontrolle auf dem Markt sind, wird es noch einige Jahre dauern, bis Autos völlig autonom über die Straßen rollen. Denn dafür muss die Technik absolut zuverlässig sein. Dabei kommt es nicht zuletzt auf die Sensoren an, die Radarsensoren zum Beispiel, die bereits jetzt selbstständig Hindernisse erkennen und eine Vollbremsung einleiten können, wenn es eng wird. Diese Sensoren werden schon heute eingehend geprüft, ehe man sie im Auto verbaut. Für das autonome Fahrzeug aber gelten noch einmal viel höhere Anforderungen. Denn wenn der Autofahrer nicht mehr lenkt, liegt es möglicherweise in der Verantwortung des Fahrzeugherstellers, einen Unfall zu verhindern.
Automobilhersteller legen daher in Sachen Zuverlässigkeit der Sensoren die Latte ziemlich hoch. Sie verlangen, dass diese auf Fahrtstrecken von mehreren Millionen Kilometern höchstens einen Fehler verursachen dürfen. Das bedeutet, dass heute in vielen Fällen Autos auf lange Testfahrten geschickt werden müssen. „Das sind eine Menge Kilometer«, sagt Dr.-Ing. Thomas Dallmann, Leiter der Forschungsgruppe Aachen am FHR. „Zudem müssen ja mehrere Sensoren getestet werden, um die Zuverlässigkeit statistisch nachweisen zu können. Das bedeutet, dass mehrere Testfahrzeuge mit Sensor lange unterwegs sein müssten.“ Ein weiteres Problem: Tritt nach vielen Tausend Kilometern ein Fehler auf, dann muss man den Sensor nachbessern und anschließend mit den Testfahrten von vorn beginnen – ein ausgesprochen zeitraubender Prozess.
Tests ins Labor verlagern
Um diesen Aufwand zu verringern, versucht man die Realität nachzubilden, und die Tests ins Labor zu verlagern. Für Radarsensoren gibt es solche Labortests bereits. Radarsensoren funktionieren so, dass sie ein Radarsignal aussenden, das von verschiedenen Gegenständen reflektiert wird. Anhand des Echos kann die Sensorelektronik dann die Szene analysieren und messen, wie weit Objekte entfernt sind – und auch wie schnell sich ein Objekt bewegt.
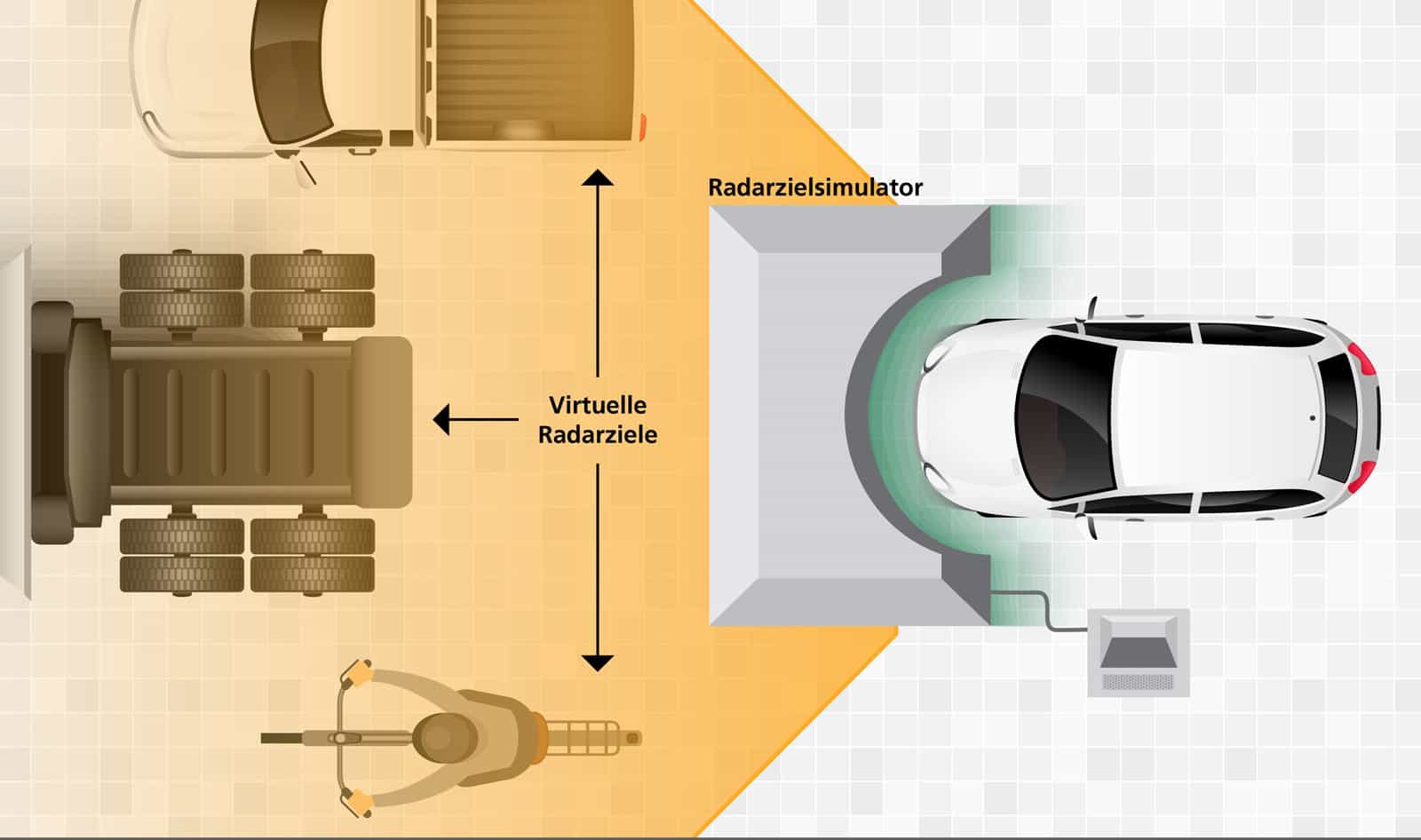
Dieses Prinzip hat man bereits im Labor nachgebaut. Und zwar mithilfe sogenannter Radarzielsensoren. Diese Sensoren nehmen die vom Fahrzeugradar ausgesandten Radarstrahlen auf. Anschließend verändern sie dieses Radarsignal so, als hätte es Gegenstände getroffen – und schicken diese Information als künstliches Echobild zurück zum Auto. Der Radarzielsensor gaukelt dem Fahrzeugradar also eine künstliche Landschaft vor. Der Vorteil liegt auf der Hand: Der Testaufbau aus Autoradar und Radarzielsensor kann im Labor Tag und Nacht laufen – ohne dass dafür ein Auto auf die Reise geschickt werden muss.
Das Problem der wenigen Radarzielsensoren, die heute auf dem Markt sind, besteht darin, dass sie bei weitem keine ganze Echolandschaft generieren können. „Letztlich können die meisten nur ein sehr reduziertes Bild mit einer einstelligen Anzahl von Reflexionen erzeugen und zum Autoradar zurücksenden“, sagt Dallmann. „Im Vergleich zur natürlichen Umgebung ist das extrem wenig.“ Immerhin besteht eine echte Szenerie aus hunderten von reflektierenden Objekten: Menschen, Autos, Bäumen, Ampeln. Selbst ein einziger Verkehrsteilnehmer kann verschiedene Reflexionen an unterschiedlichen Orten erzeugen – ein PKW etwa, bei dem Stoßfänger, Räder und Seitenspiegel unterschiedlich reflektieren. „Was das Testen von Sensoren für das autonome Fahren angeht, ist man damit noch sehr weit von einem realistischen Setting entfernt“, so der Ingenieur.

Sie sieht die einkanalige Version des Atrium-Radarzielsimulators aus.
Radarzielsensor soll bis zu 300 Reflexionen generieren
Zusammen mit seinem Team entwickelt er deshalb einen neuen, leistungsfähigeren Radarzielsensor mit dem Namen Atrium (kurz für Automobile Testumgebung für Radar In-the-loop Untersuchungen und Messungen). Dieser kann deutlich mehr reflektierende Objekte generieren. Derzeit strebt das FHR an, bis zum Projektabschluss 300 Reflexionen erzeugen zu können. Das ist enorm. „Damit kann Atrium dem Radarsensor im Auto eine relativ naturgetreue Szene vorspielen – das ist ein wenig wie ein Autokino für den Radarsensor.“
Die Atrium -Technologie ist zum Patent angemeldet, weshalb Thomas Dallmann keine Details verraten kann. Aber immerhin so viel: „Wir haben den Aufbau der Sendekanäle optimiert, wodurch diese kostengünstig aufgebaut werden können. Dadurch lassen sich die Reflexionen so darstellen, dass diese auch aus verschiedenen Richtungen auf das Radar einfallen können.“ Damit könnten neue Sensoren für das autonome Fahrzeug jetzt realitätsnah und in vollem Umfang getestet werden. „Wir werden zukünftig in der Lage sein, hochkomplexe Tests laufen zu lassen, dank derer sich der Zeitaufwand von Testfahrten wesentlich reduzieren lässt.“ Der Forscher und seine Kollegen werden den Labortestaufbau aus Fahrzeugradar und dem Atrium-Radarzielsensor während der Automotive Testing Expo vom 21. Mai bis zum 23. Mai in Stuttgart vorstellen.